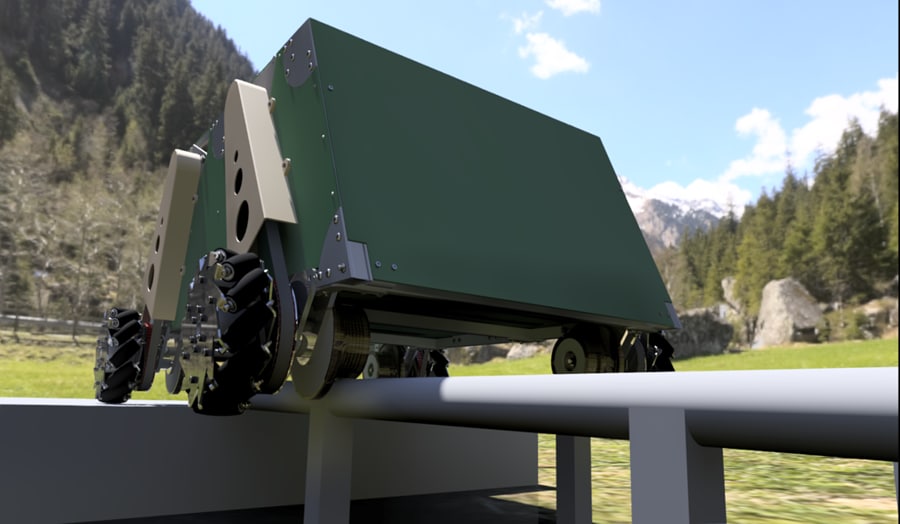
Design, assembling implementation of a Greenhouse mobile robot for tomato monitoring
We develop and deploy a Greenhouse robot with computer systems and data processing systems on board. This systems enable the robot to navigate between rows and capable of monitoring tomato condition.